E57 Example/Test Data
Please submit your E57 data file to be posted on this page to stan.coleby@gmail.com so that other implementations can help verify your implementation.
Test Utility Tools from V1.1.312
This tool will extract the XML portion of an E57 file.
>e57xmldump foo.e57 > foo.xml
e57xmldump.exe 3.2MB
This tool will validate an E57 file for compliance with the E2807 standard.
>validate57 foo.e57
validate57.exe 1.2MB
|
1. Cartesian Points
 BunnyDouble.e57 - XYZ - 726KB
BunnyDouble.e57 - XYZ - 726KB
BunnyFloat.e57 - XYZ - 366KB
BunnyInt32.e57 - XYZ - 366KB
BunnyInt24.e57 - XYZ - 276KB
BunnyInt21.e57 - XYZ - 243KB
BunnyInt19.e57 - XYZ - 220KB
BunnyData.pts 860KB
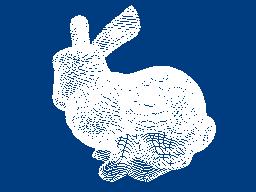
These are test point cloud data that are stored using different data types.
All E57 Readers need to be able to import these and have the same percision of data.
|
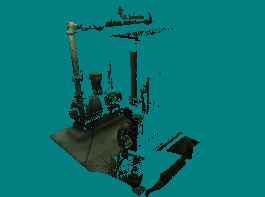
2. Point Intensity and Color
PumpACartesian.e57 (V2) - XYZ,INT,RGB - 5.3MB
This is a list of points similar to the type of data found in a PTS file.
3. Spherical Points
PumpASpherical.e57 (V2) - RAE,INT,RGB - 5.2MB
This is a list of points using spherical coordinates.
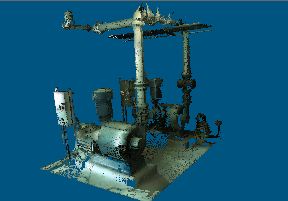
4. Structured Point Sets
PumpARowColumnIndex.e57 (V1) - XYZ,INT,RGB,STR - 6.2MB
This is gridded scan data organized with rows and columns similar to the type of data found in a PTX file.
PumpARowColumnIndexNoInvalidPoints.e57 (V1) - XYZ,INT,RGB,STR - 2.6MB
This is the same gridded scan data where invalid points were removed. (An invalid point occurs when the scanner has no return value). Because each point has its own row and column index, the data becomes a sparse matrix of only valid points.
5. Multiple Returns
PumpARowColumnIndex3ReturnIndex.e57 (V1) - XYZ,INT,RGB,RET,STR - 7.9MB
This is a generated scan where every point has 2 multiple returns points offset by 20 cm each. The pump will be duplicated 3 times shifted by the 20 cm.
6. Point Groups
PumpAGroupByLineRowColumnIndex.e57 (V1) - XYZ,INT,RGB,STR,GRP - 6.2MB
This has a GroupByLine list where each scan line (column) of data can be access individually.
PumpAGroupByLineRowColumnIndexNoInvalidPoints.e57 (V1) - XYZ,INT,RGB,STR,GRP - 2.6MB
PumpA.ptx 12MB
This is a single structured scan stored as cartesian and spherical points. Data includes intensity and RGB color.
All E57 Readers need to be able to import these.
© Copyright 2008, Carnahan-Proctor and Cross, Inc.
|
7. Multiple Scans
Pump.e57 (V3) - XYZ,INT,RGB,STR,MUL - 52.5MB
This has multiple registered scans where the pose information is given on each scan.
PumpNoInvalidPoints.e57 (V1) - XYZ,INT,RGB,STR,MUL - 22.1MB
Pump.ptx 92MB
This scene has 5 scans with intensity and RGB data and has rotation and translation information.
This was scanned using a Leica Scanstation in 06-18-2008.
It was converted to E57 using LD3 Studio V5.1.
© Copyright 2008, Carnahan-Proctor and Cross, Inc.
|

Sewer treatment plant pump room.
|
8. Visual Reference Imagery
PumpAVisualReferenceImage.e57 (V1) - XYZ,INT,RGB,STR,GRP,REF - 4.4MB
This has a single scan with Visual Reference jpeg of the Sewer treatment plant pump room image above.
9. Extensions
PumpARowColumnIndexWithExtensions.e57 (V1) - XYZ,INT,RGB,STR,GRP,EXT - 3.0MB
This is a single scan that has some extra data encoded as an typical extension. This includes some extra data between the point data fields. All readers need to be able to read this file and ignore the extension data.
|
10. Spherical Imagery
Station018.e57 (V1) - XYZ,INT,RGB,STR,SPH - 117MB
Station018.jpg 36MB
This is a single scan taken with a Leica C10 scanner and Nodel Ninja Panoramic camera.
The 271 MB ptx file and 36 MB jpg was reduced to an 117MB e57 file. Further zipping the e57 file only produced a 103MB zip file.
It was converted to E57 using LD3 Studio V5.1.
© Copyright 2010, McNiel Engineering.
|

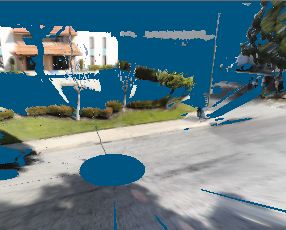
This street veiw is a 40M Pixel corrected undistorted 360 degree (8976 pixels) by 180 degree (4488 pixels) spherical image.
|
11. Faro Data - Large scan with PNG file Imagery
gargage.e57 (V1) - XYZ,INT,RGB,STR,SPH - 548.3MB
parking000.png 28MB

This scene has a large 27M point 360 degree scan and a PNG image using the spherical projection camera model.
It was scanned using a new Faro Focus 3D scanner. Next release of FARO SCENE software will support E57.
© Copyright 2011, FARO Technologies Inc.
|
12. Leica Data - Multiple Images, Structure Points and Pinhole Imagery
Parking-lot-updated.e57 (V1) - XYZ,INT,RGB,STR,GRP,MUL,PIN,MIM - 267.3MB
This scene has three 360 degree scans and multiple jpg images using the pinhole projection camera model.
It was scanned using a Leica ScanStation 2 and converted to E57 using Leica's Cyclone release.
WARNING: There are no scan names given, the image names has a illegal file name character(:), and the camera
orientation is Z forward and Y down. (E57 standard is Z backward and Y up).
© Copyright 2011, Leica Geosystems
|
13. Calabi Yau Systems Data - Multiple Scans, Structure Points and Spherical Imagery
Manitou.e57 (V4) - XYZ,INT,RGB,STR,GRP,MUL,SPH - 72MB
ManitouNoInvalidPoints.e57 (V1) - XYZ,INT,RGB,STR,GRP,MUL,SPH - 21.2MB

This scene has 5 scans and 5 jpg images using the spherical projection camera model.
It was scanned using a Reigl Z420I scanner with an LD3 Texel Camera on top in July 2007.
It was converted to E57 using LD3 Studio V5.1.
© Copyright 2012, Calabi Yau Systems LLC.
|
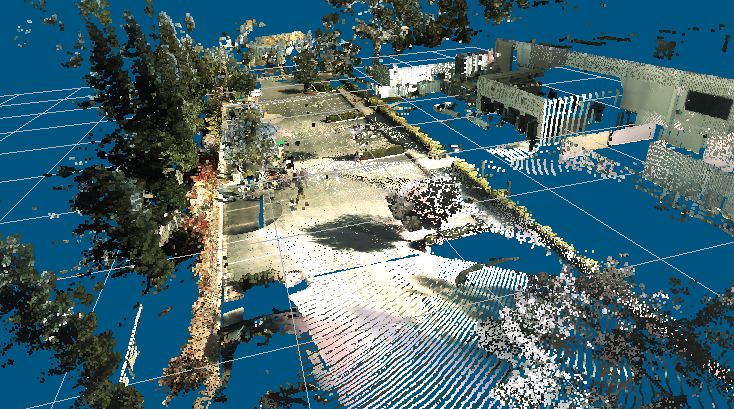
14. Riegl Data - Multiple Scans, Multiple Images, Multiple Returns
openpitmine.e57 (V4) - XYZ,INT,RGB,RET,MUL,PIN,MIM,RLMS - 553MB
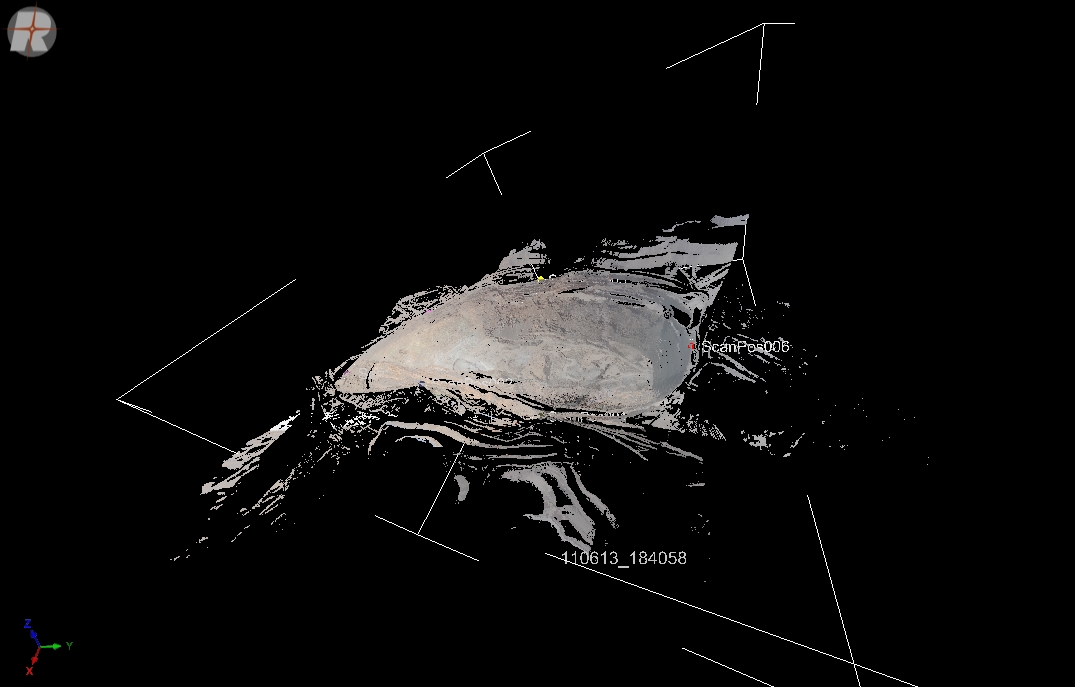
This scene has data from a couple of scanpositions together with images. The images
have been used to color the scans. The data has been obtained by a Riegl V-Line
series instrument. The E57 export has been created with a preliminary version
of the RiScanPro exporter.
© Copyright 2011, Riegl LMS GmbH.
|
15. Trimble Data - Muliple Scans point cloud
Trimble_StSulpice-Cloud-50mm.e57 (V1) - XYZ,INT,RGB,MUL - 144MB

This scene was scanned in Paris using a Trimble TX8 for project Terra Mobilita. Color has been captured with a Nikon 7100 using a fish eye Sigma 10mm. Colorization and export to e57 has been done using Trimble RealWorks 8.1. The project contains one multi-station file (5 scans down-sampled at 50mm going down from 650 M point to 8 M point) and two files containing gridded scans (down-sampled from ~120 M point to 2 M point each). Gridded files are stored as spherical coordinates and non-gridded ones use XYZ.
© Copyright 2014, Trimble Navigation Limited.
|
16. Feature Table
Use this table to look up the acronym use on this page.
Acronym |
Feature |
XYZ |
Cartesian points |
RAE |
Spherical points |
INT |
Point intensity |
RGB |
Point color |
RET |
Multiple returns |
TIM |
Time stamps |
STR |
Structured point sets |
GRP |
Point groups |
MUL |
Multiple scans |
REF |
Visual reference imagery |
PIN |
Pinhole imagery |
SPH |
Spherical imagery |
CYL |
Cylindrical imagery |
MIM |
Multiple images |
GEO |
Geodetic information |
EXT |
Extension information |
RLMS |
Extension E57_RIEGL_2011 |
NOR |
Extension E57_EXT_Surface_Normals |
DIST |
Extension E57_LEICA_Camera_Distortion |
CLASS |
Extension E57_LEICA_Terrain_Classification |
TIME |
Extension E57_LEICA_Time_Bounds |
17. Test Data License
Permission is hereby granted, free of charge, to any person or organization obtaining a copy of the test data (the "Test Data") to use, reproduce, display, distribute, publish, and transmit the Test Data, and to copy and reformat this Test Data, and to permit third-parties to whom the Test Data is furnished to do so, all subject to the following:
The copyright notices of the Test Data must be included in all copies of the Test Data, unless such copies are solely in the binary file form.
THE TEST DATA IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, TITLE AND NON-INFRINGEMENT. IN NO EVENT SHALL THE COPYRIGHT HOLDERS OR ANYONE DISTRIBUTING THE TEST DATA BE LIABLE FOR ANY DAMAGES OR OTHER LIABILITY, WHETHER IN CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE TEST DATA OR THE USE OR OTHER DEALINGS IN THE TEST DATA.
This site is © Copyright 2010 E57.04 3D Imaging System File Format Committee, All Rights Reserved.
|

{kind=link}
{kind=link}